This is description of our project completed recently to explore the Robotics in Computer Vision.
Computer vision is one of the major areas in robotics that provides sensory feedback to machines. It is concerned with computer-based systems that extract useful information from images. The image data can be acquired in forms, such as video sequences and still images from cameras. In this paper, we have implemented a vision-based color object tracking for a mobile robot using Hough transform. The object tracking is performed by realizing the color property of a targeted object using HSV (Hue, Saturation, Value) transformation. The camera mounted on the robot captures a video of the object in its viewing range and identifies the particular colored object based on the hue saturation values. Then, the object tracking is done automatically by implementing a Hough transform which provides the object position by returning the coordinates in its viewing range, thereby providing the control commands to align the mobile robot in the direction of the tracked object heuristically.
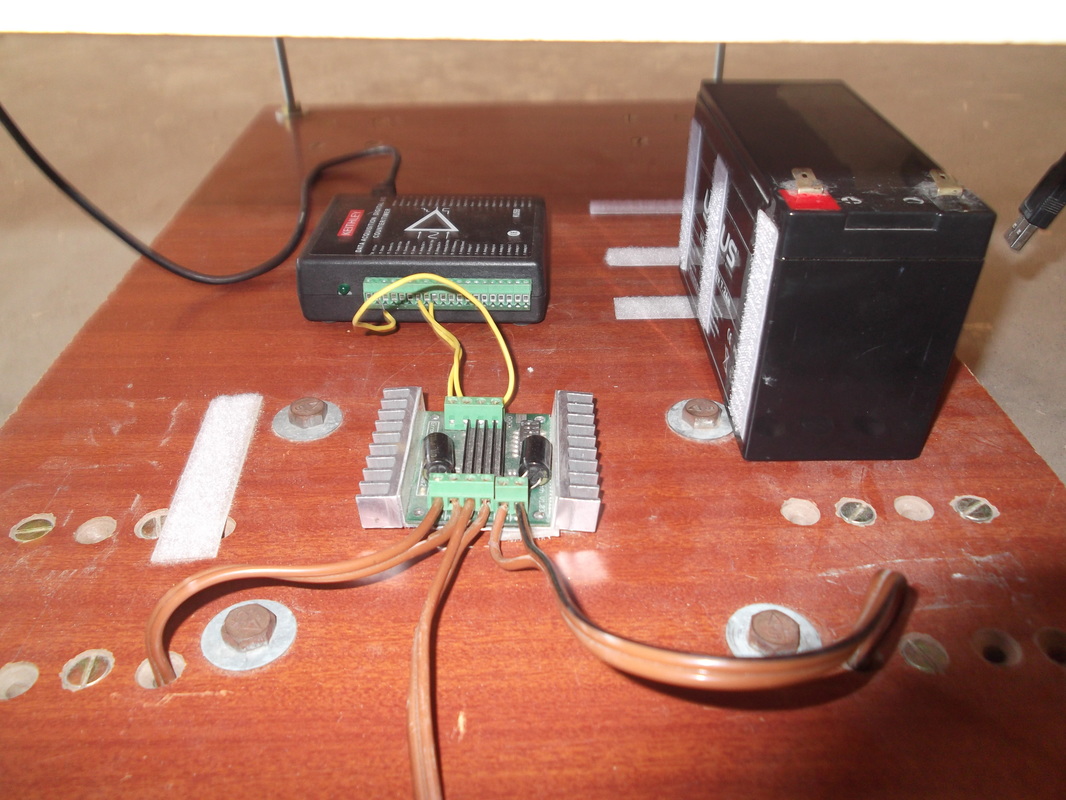
The project test bed images are shown below.
Computer vision is one of the major areas in robotics that provides sensory feedback to machines. It is concerned with computer-based systems that extract useful information from images. The image data can be acquired in forms, such as video sequences and still images from cameras. In this paper, we have implemented a vision-based color object tracking for a mobile robot using Hough transform. The object tracking is performed by realizing the color property of a targeted object using HSV (Hue, Saturation, Value) transformation. The camera mounted on the robot captures a video of the object in its viewing range and identifies the particular colored object based on the hue saturation values. Then, the object tracking is done automatically by implementing a Hough transform which provides the object position by returning the coordinates in its viewing range, thereby providing the control commands to align the mobile robot in the direction of the tracked object heuristically.
The project test bed images are shown below.